Lung-Pan Cheng
Associate Professor
Computer Science and Information Engineering
National Taiwan University
MISSION & VISION
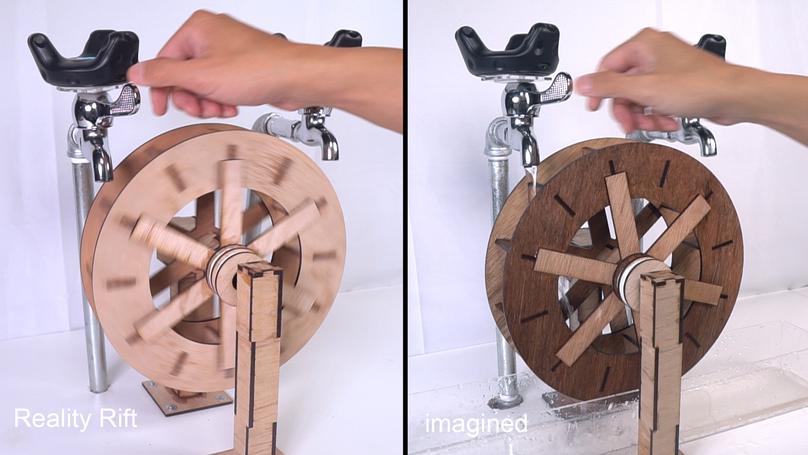
Every person exists in three types of reality. First, people live in a physical reality where things follow the common laws of physics. Second, people have their individual imagined realities where things act as wishes. Third, using computer technologies, people can create virtual realities in which the existence and behavior of people's representations and objects is programmed and can follow arbitrary rules, defined entirely by people and not by the boundaries of physics. These three realities are highly correlated but not necessarily the same. By exploring the mismatch between these three realities, we see new concepts, new techniques, and new devices emerging, interfacing and extending these three instantiations of a reality towards one ultimate reality where creation, abstraction and embodiment are met.